Test d’indentation instrumenté (IIT)
La dureté peut être définie comme la capacité d'un matériau à résister à la déformation plastique. Cette propriété considérable occupe les métallurgistes depuis des décennies, notamment avec le développement de méthodes d'essai leur permettant de mesurer et de valoriser cette résistance. Bien que les tests de dureté classiques tels que les tests Vickers, Brinell ou Rockwell aient été largement utilisés et améliorés tout au long du 20ème siècle, des limitations critiques ont été révélées par l'essor des micro- et nano-technologies.
Historique des test de dureté
Tout au long du 20ème siècle, les principales méthodes de test de dureté classiques – Brinell, Vickers, Rockwell et Knoop – ont été améliorées et définies comme des normes. Cependant, les inconvénients de ces techniques demeuraient, notamment en ce qui concerne la caractérisation des revêtements et des films minces. Avec les progrès de la miniaturisation, des méthodes alternatives ont été développées pour caractériser les propriétés mécaniques jusqu'à l'échelle nanométrique. En 1992, Warren Oliver et George Pharr ont publié un article sur l'essai d'indentation instrumenté (IIT), également connu sous le nom de l'indentation à détection de profondeur (DSI), dans lequel ils décrivaient une méthodologie pour mesurer la dureté des matériaux et le module élastique par indentation instrumentée. Contrairement aux essais de dureté classiques, cette méthode d'indentation quasi-statique est réalisée en pressant un pénétrateur, généralement un diamant de géométrie connue, dans la surface à tester avec une charge incrémentale. Pendant cette indentation, à la fois la profondeur d'indentation et la charge normale sont surveillées tout au long de l'insertion et du retrait de l'indenteur. Cela entraîne le tracé d'une courbe de chargement et de déchargement de la charge appliquée en fonction de la profondeur d'enfoncement.
Avantages des essais d’indentation instrumentée
Contrairement aux tests conventionnels, l'IIT peut être appliqué sur des revêtements épais à fins et sur des matériaux en vrac allant de durs à mous. Un des principaux avantages des essais d'indentation instrumentés (IIT) est également que, par le biais d'une série d'équations mathématiques, une dureté instrumentée (HIT) et un module élastique instrumenté (EIT) sont calculés en une seule mesure rapide. L'observation et la mesure de l'empreinte résiduelle ne sont plus requises. Les mesures peuvent donc être entièrement automatisées avec la définition de matrices ou de protocoles de mesure spécifiques. Aujourd'hui, de nouvelles méthodes d'analyse ont été mises en œuvre qui permettent la détermination de propriétés supplémentaires d'un matériau testé, telles que, entre autres, le comportement de fluage et les propriétés viscoélastiques. L'IIT est donc une technique très polyvalente qui convient aux travaux de recherche et de développement ainsi qu'au contrôle de la qualité.
Principe des tester Indentation instrumentée
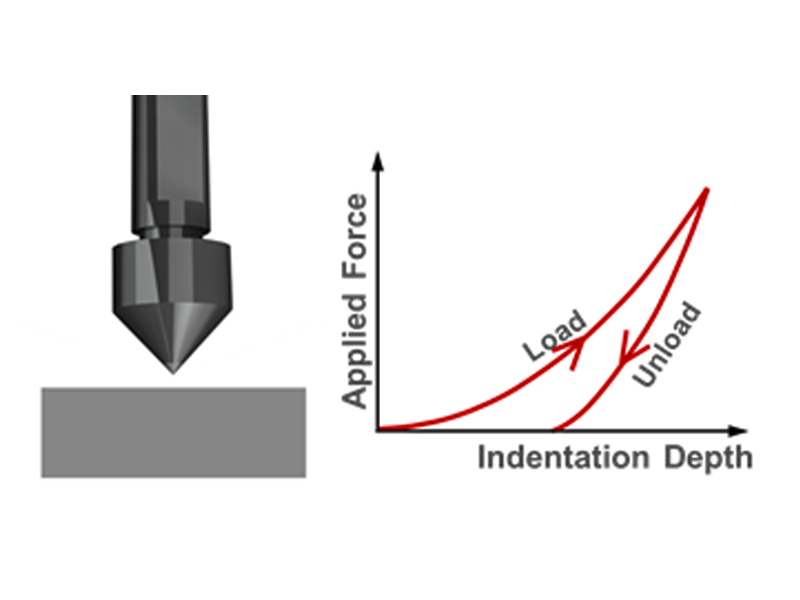
Les testeurs d'indentation instrumentés utilisent une méthode bien établie dans laquelle une pointe d'indenteur avec une géométrie connue pénètre dans une zone spécifique du matériau à tester en appliquant une charge normale croissante. La profondeur de l'indentation est contrôlée par un capteur de déplacement. Pour chaque cycle de chargement-déchargement, la valeur de la charge appliquée est tracée par rapport à la position correspondante de l'indenteur. Les courbes résultantes de la force en fonction de la profondeur d'indentation fournissent des données spécifiques à la nature mécanique du matériau examiné. Des modèles établis sont utilisés pour calculer des valeurs de dureté quantitative et de module d'élasticité pour ces données. La norme ISO 14577 spécifie que la méthode d'essai d'indentation instrumentée peut être contrôlée par la charge ou par la profondeur pour la détermination des propriétés mécaniques des matériaux. Il définit également trois plages de mesure :
Gamme d'indentation
| Plage macro |
2 N ≤ F ≤ 30 kN Plage micro |
F < 2 N; h > 0,2 µm Plage nano |
h ≤ 0,2 µm |
Analyse de la courbe de chargement-déchargement
L'indenteur, initialement en contact avec la surface, est enfoncé dans le matériau à une vitesse prédéfinie jusqu'à ce qu'il atteigne une charge prédéfinie ou une profondeur maximale prédéfinie. La charge est ensuite réduite à zéro à la même vitesse (déchargement). Dans le cas d'un film mince, il convient de noter que pour éviter l'effet du substrat sur la dureté mesurée et le module élastique, la profondeur d'enfoncement maximale de l'indenteur ne doit pas dépasser 10 % de l'épaisseur du film mince.
La figure suivante montre la réponse d'un matériau élastique-plastique lors de l'indentation par une pointe Berkovich. Dans cette figure, hc, qui est la profondeur de contact, est défini comme la profondeur d'indentation lorsque l'indenteur est en contact avec l'échantillon.
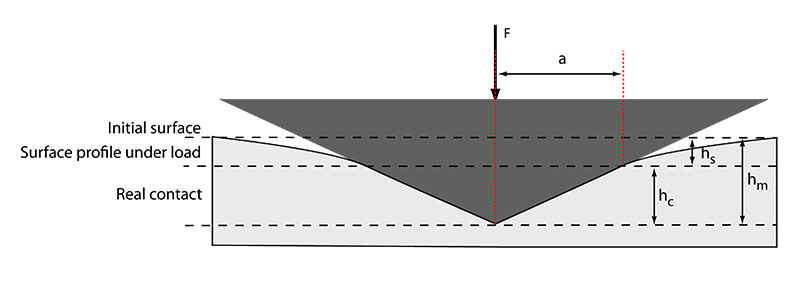
Lors du test, h, qui est la profondeur mesurée, peut être décrite par la relation suivante :
$$h_m = h_s + h_c$$
Équation 1
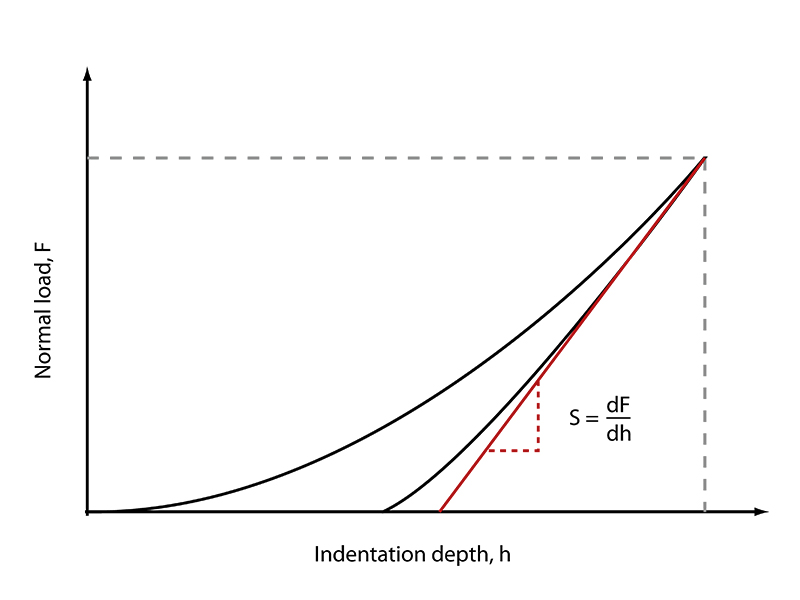
hs est le déplacement de la surface au périmètre du contact et hc est la distance verticale le long de laquelle le contact est établi. À pleine charge, la charge et le déplacement sont Fm et hm, respectivement, et le rayon du contact est a. La profondeur de contact hc est calculée selon la norme ISO 14577 en utilisant l'équation suivante :
$$h_c = h_m - \varepsilon \frac{F_m}{{S}}$$
Équation 2
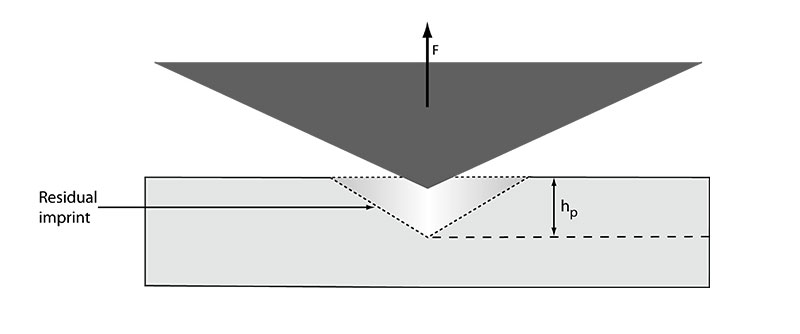
Où hm est la profondeur d'indentation maximale, Fm la charge normale maximale, ε est une constante liée à la géométrie de l'indentateur et S est la rigidité de l'échantillon calculée à partir de la portion de déchargement de la courbe d'indentation. Lorsque l'indenteur est complètement retiré et que le déplacement élastique est récupéré, la profondeur finale de l'empreinte de dureté résiduelle est hp.
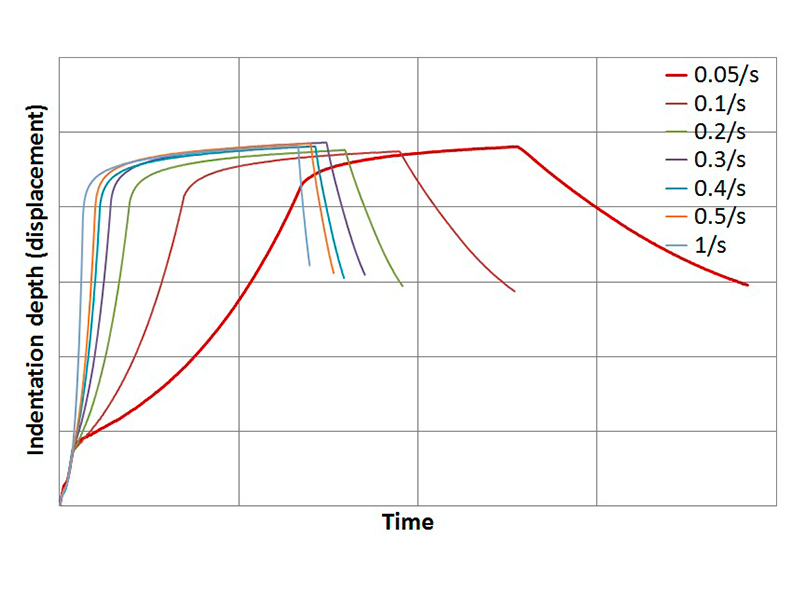
Influence de l'épaisseur
L'une des applications les plus populaires de la nanoindentation est la détermination des propriétés mécaniques des films minces. Cependant, la principale difficulté rencontrée dans la nanoindentation des films minces est d'éviter l'influence du substrat. L'approche courante pour isoler les propriétés du film du substrat consiste à adopter une directive souvent utilisée qui consiste à effectuer des mesures jusqu'à une profondeur d'enfoncement maximale ne dépassant pas 10 % de l'épaisseur du film. Des méthodes plus avancées ont également été publiées, mais elles nécessitent généralement des tests plus complexes tels que l'indentation dynamique et/ou des logiciels propriétaires (Siomec, etc.).
![Profondeur maximale d’indentation [μm]](https://wiki.anton-paar.com/fileadmin/wiki/images/Indentation_testing/05_new.jpg)
Calcul de dureté instrumenté
La dureté est exprimée par le rapport entre la charge appliquée et la surface de contact. En pratique :
$$H_{IT} = \frac{F_m}{A_p}$$
Équation 3
Fm est la charge maximale et Ap est la surface de contact entre l'indenteur et l'échantillon à la profondeur et à la charge maximales.
Calcul du module élastique instrumenté
Comme décrit dans la norme ISO14577, le module réduit, Er, est utilisé pour tenir compte du fait que les déplacements élastiques se produisent à la fois dans l'indenteur et l'échantillon. Le module élastique instrumenté dans le matériau d'essai, EIT, peut être calculé à partir de Er en utilisant la formule suivante :
$$\frac{1}{E_r}= \frac{(1-{\nu_s}^2)}{E_{IT}} + \frac{(1-{\nu_i}^2)}{E_{i}} $$
Équation 4
νs est le coefficient de Poisson pour l'échantillon et Ei et νi sont respectivement le module élastique et le coefficient de Poisson de l'indenteur. Ce module d'élasticité réduit peut être lié à la rigidité mesurée S par la relation :
$${E'}= {\frac{\sqrt{\pi}}{2\beta}} {\frac{s}{\sqrt{A_p}}}(1-\nu^2)$$
Équation 5
Le module élastique instrumenté de l'échantillon mesuré peut alors être calculé grâce à l'équation ci-dessous :
$$\frac{1}{E_r}= \frac{(1-{\nu_s}^2)}{E_{IT}} + \frac{(1-{\nu_i}^2)}{E_{i}} $$
Équation 6
Le module d'indentation EIT est comparable au module de Young du matériau. Lorsque le coefficient de Poisson de l'échantillon est inconnu, un module de déformation plane peut également être calculé.
$$E^{\ast} = \frac{1}{\frac{1}{E_r} - \frac{1-({\nu_i}^2)}{E_i}} = \frac{E_{IT}}{1-({\nu_s}^2)}$$
Équation 7
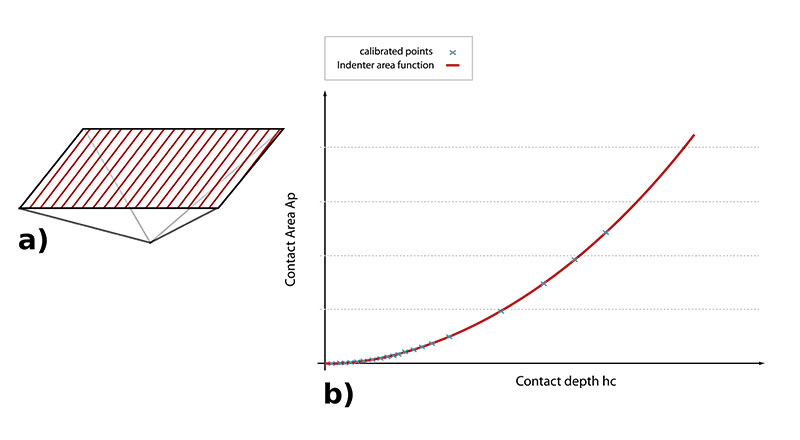
Détermination de la surface de contact projetée
Comme indiqué ci-dessus, le calcul de HIT et EIT est influencé par la fonction de surface de l'indenteur Ap. Pour un indenteur idéalement pointu, la fonction de surface est :
$$A_p = {C_0}{h_c}^2$$
Équation 8
hc est la profondeur de contact (voir Figure 3). Cette équation peut être utilisée pour fournir une première estimation de la surface de contact, où la constante C0 dépend de la géométrie de l'indenteur (C0=24,5 pour un Berkovich et 6,3 pour un indenteur à coin de cube). Cependant, les pointes d'indentation n'ont jamais la forme idéale (théorique), ce qui doit être pris en compte, surtout lors de l'indentation à des profondeurs peu profondes, en calibrant la fonction de zone de l'indenteur. La norme ISO 14577 décrit deux méthodes pour déterminer la fonction de surface de pointe complète :
- mesure directe à l'aide d'un microscope à force atomique (AFM) traçable
- indirectement en effectuant des mesures d'indentation dans un matériau ayant un module de Young connu (ou un module de déformation plane connu) et un coefficient de Poisson.
Même si la première méthode donne des résultats précis, la méthode indirecte est la plus largement utilisée en raison de la facilité de mise en œuvre. Expérimentalement, plusieurs indentations sont réalisées sous des charges incrémentales sur un matériau aux propriétés certifiées (généralement de la silice fondue). Pour chaque mesure, la rigidité S et la profondeur de contact hc sont calculées et la surface projetée est calculée selon l'équation 5 expliquée ci-dessus. L'évolution de Ap par rapport à la profondeur de contact peut alors être ajustée et tracée grâce à la fonction d'ajustement suivante :
$$A_p = {C_0}{h_c}^2 +{C_1}{h_c} +{C_2}{h_c}^{rac{1}{2}}+ ...+ {C_8}{h_c}^{rac{1}{128}}$$
Équation 9
Les constantes C0…C8 peuvent être déterminées par la mesure des données et la méthode décrite par Oliver et Pharr. Cette fonction de conseil complète est nécessaire si des valeurs précises de EIT et HIT doivent être déterminées.
Résultats supplémentaires
En plus de la dureté d'indentation et du module élastique, d'autres calculs peuvent également être obtenus à partir des tests d'indentation instrumentés. Pour en nommer quelques-uns : dureté Martens (HM), dureté instrumentée Vickers (HVIT), fluage (CIT), travail plastique/élastique, etc.
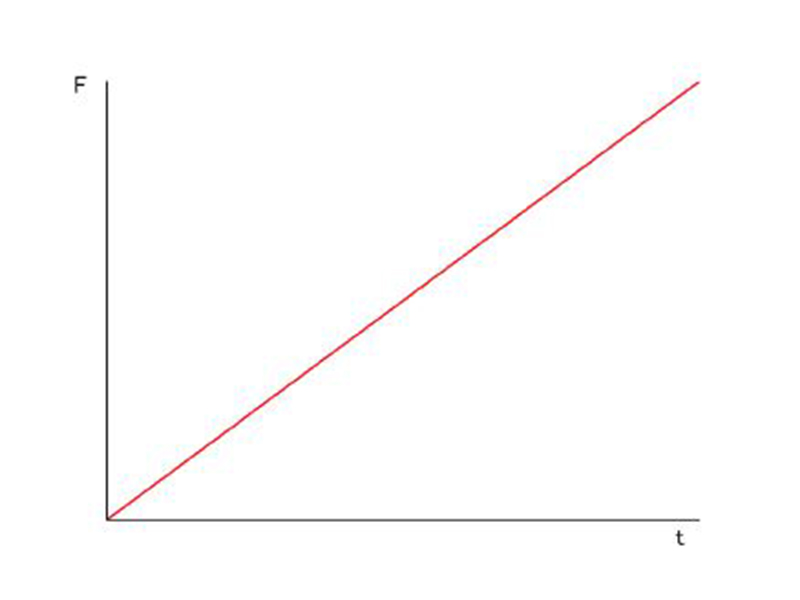
Indentation contrôlée par charge
Le mode d'indentation contrôlé par la charge est le type d'indentation le plus courant pour la mesure de la dureté et du module d'élasticité de manière simple et efficace. Il est décrit en détail dans la norme ISO 14577. Une mesure d'indentation contrôlée par charge consiste à effectuer une mesure d'indentation dans laquelle les taux de chargement et de déchargement peuvent être définis indépendamment. Grâce à ce mode, différents types de chargement peuvent être choisis, permettant à l'utilisateur d'accélérer le temps total de test ou d'analyser la réponse de différents matériaux à différents taux de chargement et de déchargement. Le chargement linéaire est le type de chargement le plus couramment utilisé. Il peut être utilisé pour la plupart des applications de test d'indentation régulières. Le chargement de l'indenteur suit la formule suivante :
$$F = k.t$$
Équation 10
Dans cette formule, k fait référence au taux de chargement, généralement exprimé en [mN/s]. En supposant que la dureté est constante, la profondeur suit une évolution en racine carrée par rapport au temps ($F\sim{\sqrt{h}}$). Le temps de chargement recommandé donné dans l'ISO 14577 et l'ASTM 2808 est de 30 secondes, mais lors de l'essai de matériaux non viscoélastiques et pour des raisons de réduction du temps, cette valeur peut être réduite.
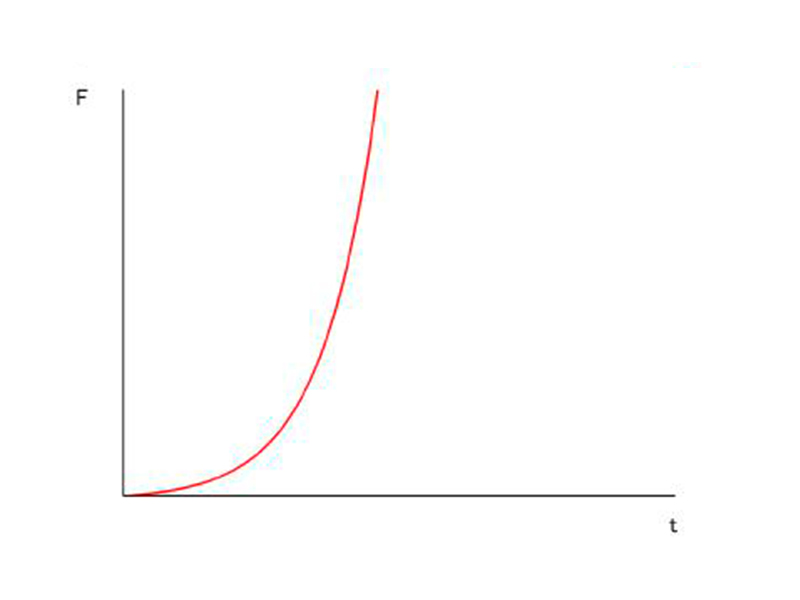
Chargement à un taux de déformation constant
Les matériaux viscoélastiques, y compris les polymères, présentent des propriétés mécaniques dépendant de la vitesse de déformation, qui exprime la déformation du matériau par unité de temps. Afin de comparer des échantillons de ce groupe de matériaux, un taux de déformation constant doit être maintenu lors des mesures d'indentation. Ce type de contrôle d'indentation est basé sur l'équation suivante :
$$rac{dP}{dt} = const.$$
Équation 11
Utiliser différentes vitesses de déformation constantes peut être avantageux pour observer la réponse au fluage et également pour trouver des conditions d'indentation optimales afin de réduire les effets du temps de chargement sur le module élastique dans le cas des matériaux viscoélastiques.
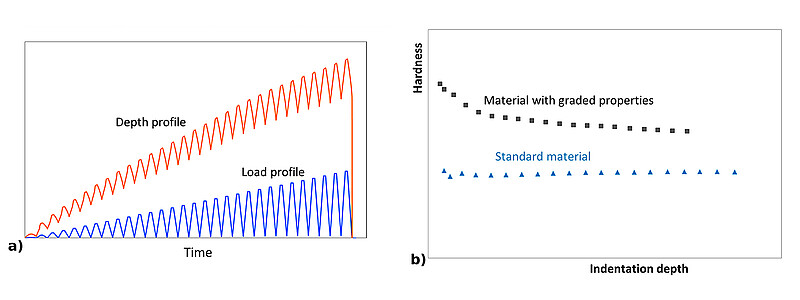
Indentation de chargement cyclique
Les indentations avec chargement appliqué de manière cyclique pendant une procédure peuvent être particulièrement utiles pour obtenir des profils de profondeur de dureté ou de module élastique sur des matériaux ayant des propriétés mécaniques graduées telles que les matériaux fonctionnellement gradués (FGM) ou dans des systèmes revêtus multicouches. Les propriétés mécaniques de tels matériaux sont classées de la surface vers le substrat porteur ou le matériau intérieur. Les procédures d'indentation cyclique permettent de caractériser la dureté et le module élastique en fonction de la profondeur d'indentation. Le chargement/déchargement dans chaque cycle peut être défini soit en fonction de la charge, soit de la profondeur.
Indentation dans les modes de contrôle de profondeur
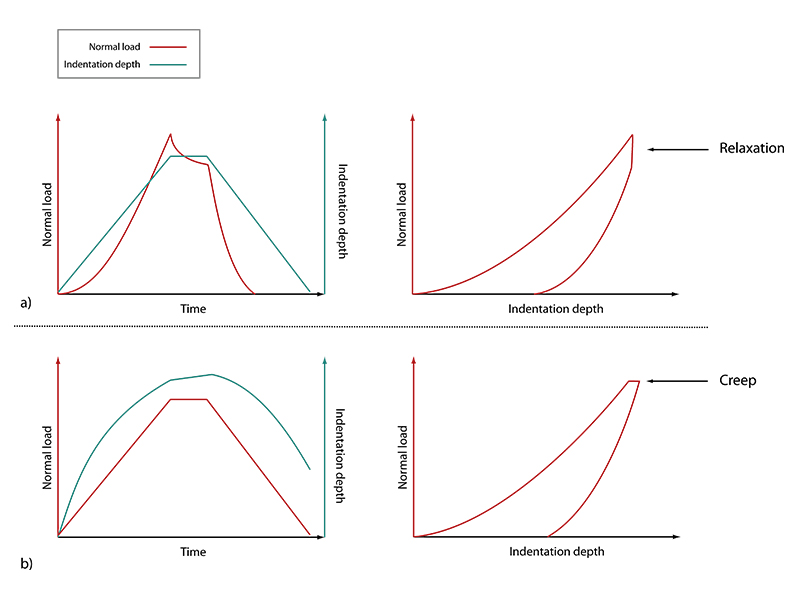
Certaines mesures peuvent nécessiter une indentation en « contrôle de profondeur » plutôt qu'en « contrôle de charge ». Un exemple typique est l'étude de l'effet pop-in pour comprimer des micropiliers. Dans ces mesures, le pilier se déforme soudainement, ce qui est beaucoup mieux visible dans la chute de la charge de compression alors que la charge est temporairement diminuée. Le mode de contrôle de profondeur complet permet également la mesure de la relaxation pour des matériaux ayant des propriétés dépendantes du temps telles que les polymères ou les hydrogels grâce à une profondeur constante à la profondeur maximale : à mesure que le matériau se détend, la charge sur l'indenteur diminue. Le mode « contrôle de profondeur » permet d'atteindre une profondeur d'indentation maximale spécifiée en contrôlant la vitesse d'insertion et la vitesse de retrait (en m/min) de l'indenteur. La figure 11 compare les différentes courbes obtenues avec un mode de « contrôle de profondeur » et un mode de « contrôle de charge ». La figure 11a) montre un exemple de chargement linéaire utilisant un contrôle de profondeur. La profondeur d'indentation est contrôlée par servo tout au long de la séquence de test et l'évolution de la force résultante est mesurée. Dans cet exemple, une retenue de la profondeur d'enfoncement maximale a été définie afin de mesurer la relaxation de l'échantillon, en d'autres termes l'évolution de la charge normale au fil du temps qui doit être appliquée pour maintenir la profondeur d'enfoncement définie. La figure 11b) présente un chargement linéaire contrôlé par la charge. La charge normale est contrôlée par servo et l'évolution de la profondeur d'indentation résultante est surveillée. Maintenir une force pendant une durée définie permettra de caractériser le comportement de fluage de l'échantillon, qui est en pratique l'évolution de la profondeur d'indentation au fil du temps sous la charge normale définie.
Analyse mécanique dynamique
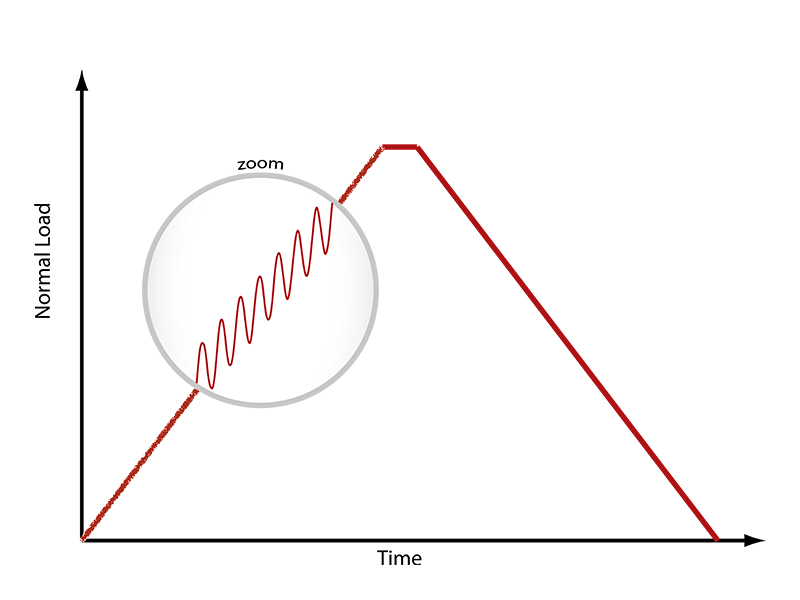
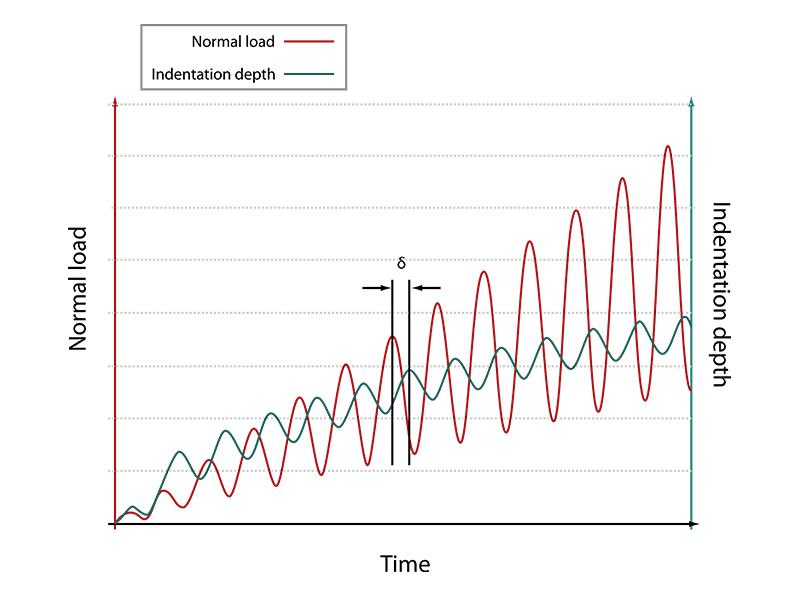
Lors de l'analyse du comportement des matériaux dépendants du temps tels que les polymères, les essais d'indentation peuvent fournir de grandes contributions grâce à l'utilisation d'un mode dynamique. Cette technique, introduite par Oliver et Pharr, permet une mesure continue de la rigidité des matériaux pendant le processus de chargement en utilisant une force oscillante de faible magnitude superposée au signal de force quasi-statique (Figure 12). Si les amplitudes d'oscillation sont suffisamment petites, on peut supposer que la déformation de l'échantillon reste dans le régime viscoélastique linéaire pendant le mode « sinus ». Lors d'une mesure, si une oscillation de force est appliquée sur l'échantillon à une fréquence spécifique, elle générera des oscillations sur le signal de déplacement avec un angle de phase δ (Figure 13). La réponse viscoélastique du matériau testé peut être modélisée à l'aide d'un ressort ayant une rigidité S, qui présente un comportement élastique, couplé en parallèle avec un amortisseur ayant un facteur d'amortissement D qui modélise le comportement visqueux de l'échantillon.
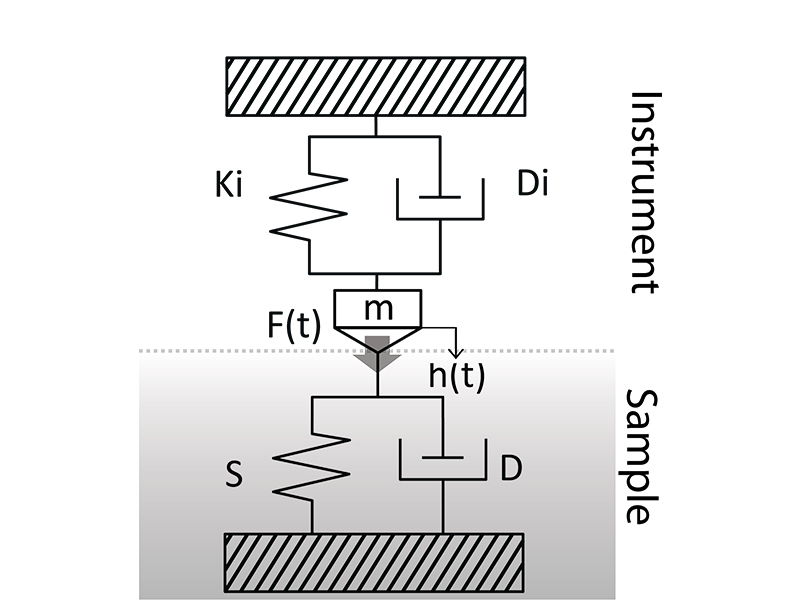
Le modèle mécanique dynamique présenté dans la Figure 14 est utilisé pour décrire le comportement viscoélastique de l'échantillon. La rigidité dynamique Ki, le facteur d'amortissement Di ainsi que la masse oscillante m de l'instrument sont connus (peuvent être calibrés). Ainsi, en mesurant la demi-force (F0) et l'amplitude de déplacement (h0), la fréquence angulaire d'oscillation ω ainsi que l'angle de phase δ entre les oscillations de force et de déplacement, il est possible de calculer la rigidité dynamique de l'échantillon S, et l'amortissement dynamique de l'échantillon D.
$$S = {\frac{F_0}{h_0}}cos{\delta}+{m\omega}^2-K_i$$
Équation 12
$$D={\frac{1}{\omega}}{\frac{F_0}{h_0}}sin\delta - D_i$$
Équation 13
Les paramètres viscoélastiques (module de stockage et module de perte et tangente de perte) sont ensuite calculés à l'aide des équations suivantes :
$${E'}= {\frac{\sqrt{\pi}}{2\beta}} {\frac{s}{\sqrt{A_p}}}(1-\nu^2)$$
Équation 14
$${E'}= {\frac{\sqrt{\pi}}{2\beta}} {\frac{s}{\sqrt{A_p}}}(1-\nu^2)$$
Équation 15
$$tan\delta=\frac{E''}{E'}$$
Équation 16
Conclusion
L'indentation instrumentée a été établie comme la caractérisation de référence des propriétés mécaniques des films minces ou des matériaux en vrac. Les progrès réalisés dans l'instrumentation permettent la détermination précise de, entre autres, le module élastique et la dureté de divers matériaux, des matériaux souples aux très durs. Les différents modes de servocommande et les paramètres de mesure ajustables permettent également l'analyse des spécificités des matériaux. Les mesures d'indentation dynamique offrent notamment l'avantage de mesurer la dureté et le module en profondeur d'un échantillon ainsi que les propriétés viscoélastiques. Enfin, le cycle de mesure rapide et le calcul automatisé peuvent être un grand avantage dans l'utilisation de l'indentation instrumentée comme contrôle de qualité.
Références
- Oliver, W. et Pharr, G. (1992). Une technique améliorée pour déterminer la dureté et le module d'élasticité en utilisant des expériences d'indentation par détection de charge et de déplacement. Journal de la recherche sur les matériaux, 7(06), pp. 1564–1583.
- Oliver, W. et Pharr, G. (2004). Mesure de la dureté et du module élastique par indentation instrumentée : Avancées dans la compréhension et perfectionnements de la méthodologie. Journal de la recherche sur les matériaux, 19(1), pp. 3–20.
- Fischer-Cripps, A. (2011). Nanoindentation New York, NY : Springer-Verlag New York Inc.
- Association suisse de normalisation (SNV) (2014). Matériaux métalliques - essai de dureté Brinell - Partie 1 (ISO 6506-1:2014).
- Normes internationales ISO 4545-1 Matériaux métalliques - Essai de dureté Knoop. Genève : ISO.
- Normes internationales Matériaux métalliques – Essai de dureté Rockwell Genève : ISO.
- Normes internationales Matériaux métalliques – Essai de dureté Vickers Genève : ISO.
- Normes internationales ISO 14577 - Matériaux métalliques – Essai d'indentation instrumentée pour la détermination de la dureté et des propriétés mécaniques des matériaux Genève : ISO.
- ASTM International ASTM E2546 - Nouvelle pratique pour les tests d’indentation instrumentée Conshohocken : ASTM.
- Oliver, W. et Pharr, G. (2008). Nanoindentation et la caractérisation dynamique des solides viscoélastiques. Journal de la physique D : physique appliquée, 41(7) 074021, pp. 1-9