Les principes de la diffusion dynamique de la lumière
La méthode de diffusion dynamique de la lumière (DLS) est la technique de mesure la plus courante pour l’analyse de la taille des particules dans la gamme nanométrique. Cet article traite de la théorie et de la configuration DLS de base et explique comment la taille des particules est déterminée. De plus, le résultat typique d'une analyse DLS est montré et des conseils pratiques sur les paramètres de mesure et la vérification des données sont inclus.
Contexte théorique de la diffusion dynamique de la lumière
La diffusion dynamique de la lumière (DLS) est basée sur le mouvement Brownian des particules dispersées. Lorsque des particules sont dispersées dans un liquide, elles se déplacent de manière aléatoire dans toutes les directions. Le principe du mouvement brownien est que les particules entrent constamment en collision avec les molécules de solvant. Ces collisions provoquent un certain transfert d'énergie, ce qui induit un mouvement des particules. Le transfert d'énergie est plus ou moins constant et a donc un effet plus important sur les particules plus petites. En conséquence, les particules plus petites se déplacent à des vitesses plus élevées que les particules plus grandes. Si vous connaissez tous les autres paramètres qui ont une influence sur le mouvement des particules, vous pouvez déterminer le diamètre hydrodynamique en mesurant la vitesse des particules. La relation entre la vitesse des particules et la taille des particules est donnée par l'équation de Stokes-Einstein (Équation 1). La vitesse des particules est donnée par le coefficient de diffusion translationnelle D. De plus, l'équation inclut la viscosité du dispersant et la température car les deux paramètres influencent directement le mouvement des particules. Une exigence de base pour l'équation de Stokes-Einstein est que le mouvement des particules doit être uniquement basé sur le mouvement Brownian. S'il y a sédimentation, il n'y a pas de mouvement aléatoire, ce qui entraînerait des résultats inexacts. Par conséquent, le début de la sédimentation indique la limite supérieure de taille pour les mesures DLS. En revanche, la limite inférieure de taille est définie par le rapport signal-bruit. Les petites particules ne diffusent pas beaucoup de lumière, ce qui entraîne un signal de mesure insuffisant.
$D= \frac{k_BT}{6\pi\eta R_H}$ Équation 1: L'équation de Stokes-Einstein D Coefficient de diffusion translationnelle [m²/s] – “vitesse des particules”
kB Constante de Boltzmann [m²kg/Ks²]
T Température [K]
h Viscosité [Pa.s]
RH Rayon hydrodynamique [m]
La configuration de base du DLS
La configuration de base d'un instrument DLS est montrée dans la Figure 1. Un laser à fréquence unique est dirigé vers l'échantillon contenu dans une cuvette. S'il y a des particules dans l'échantillon, la lumière laser incidente se disperse dans toutes les directions. La lumière dispersée est détectée à un certain angle au fil du temps et ce signal est utilisé pour déterminer le coefficient de diffusion et la taille des particules par l'équation de Stokes-Einstein.
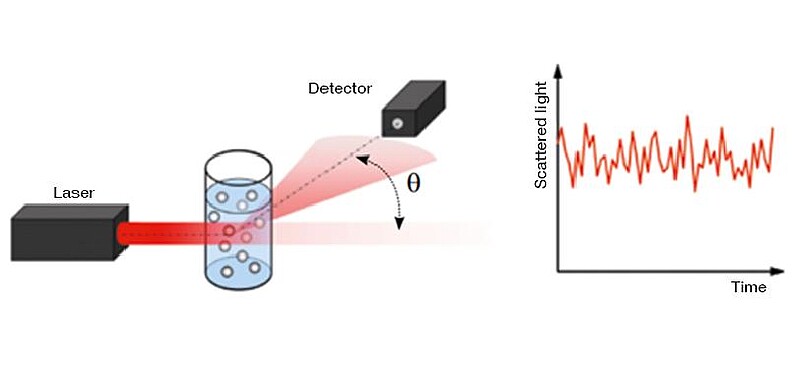
Figure 1 : Configuration de base d'un système de mesure DLS. L'échantillon est contenu dans une cuvette. La lumière dispersée du laser incident peut être détectée à différents angles.
La lumière laser incidente est généralement atténuée par un filtre gris qui est placé entre le laser et la cuvette. Les paramètres du filtre sont soit ajustés automatiquement par l'instrument, soit peuvent être réglés manuellement par l'utilisateur. Lorsque des échantillons troubles sont mesurés, le détecteur ne serait pas en mesure de traiter la quantité de photons. Par conséquent, la lumière laser est atténuée pour recevoir un signal suffisant mais traitable au détecteur. Les instruments DLS modernes incluent deux, ou dans le cas du Litesizer™ 500 trois, angles de détection pour les mesures de taille des particules. En fonction de la turbidité de l'échantillon, la diffusion latérale (90°) ou la diffusion arrière (175°) est plus adaptée. Un angle d'avance (15°) peut être utilisé pour surveiller l'agrégation. Pour plus d'informations sur ce sujet, voir la section "Choisir le bon angle de mesure".
Trace d'intensité et fonction de corrélation
La lumière dispersée est détectée sur une certaine période de temps afin de surveiller le mouvement des particules. L'intensité de la lumière diffusée n'est pas constante mais fluctuera au fil du temps. Des particules plus petites, qui se déplacent à des vitesses plus élevées, montrent des fluctuations plus rapides que les particules plus grandes. D'autre part, des particules plus grandes entraînent des amplitudes plus élevées entre les intensités de diffusion maximales et minimales, comme le montre la Figure 2 (panneaux supérieurs). Cette trace d'intensité initiale est ensuite utilisée pour générer une fonction de corrélation (Fig. 2, panneaux inférieurs). En général, la fonction de corrélation décrit combien de temps une particule est située au même endroit dans l'échantillon. Au début, la fonction de corrélation est linéaire et presque constante, indiquant que la particule est toujours à la même position qu'elle l'était au moment précédent. Plus tard, vous pouvez voir une décroissance exponentielle de la fonction de corrélation, ce qui signifie que la particule est en mouvement. S'il n'y a aucune similarité avec le point initial, la fonction de corrélation montre à nouveau un comportement linéaire. Cette partie de la fonction de corrélation est connue sous le nom de ligne de base. L'information sur le mouvement dépendant de la taille est incluse dans la décroissance de la fonction de corrélation. La désintégration représente une mesure indirecte du temps que les particules mettent à changer leurs positions relatives. De petites particules se déplacent rapidement, donc la désintégration est rapide. Les particules plus grandes se déplacent plus lentement et donc la décroissance de la fonction de corrélation est retardée.
Différences dans la trace d'intensité et la fonction de corrélation des grandes et petites particules. Des particules plus petites montrent des fluctuations plus rapides de la lumière diffusée et un déclin plus rapide de la fonction de corrélation.
En fait, la fonction de corrélation est une description mathématique des fluctuations de la lumière diffusée. Il est utilisé pour déterminer le coefficient de diffusion translationnelle. Pour ce faire, l'intensité de la lumière diffusée à un moment t est comparée à l'intensité de la même trace d'intensité décalée par le temps de retard ꞇ (tau). Ce concept mathématique abstrait est visualisé dans la Figure 3. Il montre la même trace d'intensité que celle enregistrée lors de la mesure et décalée pour différents temps de retard ꞇ. Différents temps de retard sont marqués par une couleur différente. Chaque valeur unique de G2 est ensuite obtenue en additionnant le produit de deux valeurs en même temps de ces deux traces d'intensité, ce qui est indiqué par la connexion colorée pour une position par temps de retard. Faire cela pour différents temps de retard donne la fonction de corrélation souhaitée. Ces calculs sont effectués en temps réel et tracés sur un axe temporel logarithmique. Les algorithmes cumulants sont utilisés pour ajuster la fonction de corrélation, qui est une procédure normalisée ISO. Le coefficient de diffusion est déterminé à partir de l'algorithme des cumulants ; le diamètre hydrodynamique (c'est-à-dire la taille des particules) est obtenu par l'équation de Stokes-Einstein déjà discutée.
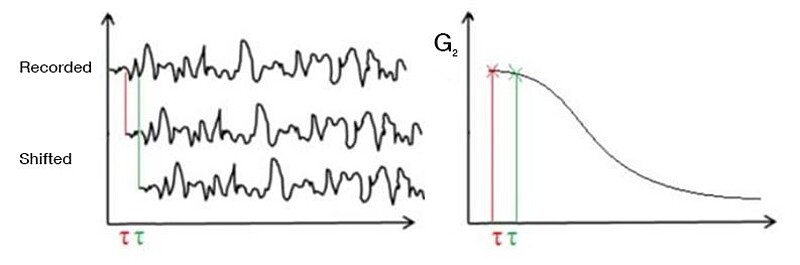
Figure 3 : Traduire la trace d'intensité (panneau de gauche) en une fonction de corrélation (panneau de droite)
Résultats de mesure
Comme décrit ci-dessus, la taille des particules de l'échantillon n'est pas mesurée directement mais est basée sur le mouvement des particules. Le terme diamètre hydrodynamique fait référence à la taille des particules de particules lisses et sphériques qui diffusent à la même vitesse que les particules de l'échantillon. Cela doit être gardé à l'esprit lorsque les résultats des mesures DLS sont comparés à d'autres techniques, qui se réfèrent à différents paramètres physiques de l'échantillon. L'indice de polydispersité (PDI) est donné afin de décrire l'amplitude de la distribution des tailles de particules. L'indice de polydispersité est également calculé par la méthode des cumulants. Une valeur inférieure à 10 % reflète un échantillon monodisperse et indique que toutes les particules mesurées ont presque la même taille. Cependant, l'indice de polydispersité ne fournit aucune information sur la forme de la distribution des tailles ou le rapport entre deux fractions de particules. Cette information est fournie par le graphique de distribution de la taille des particules, qui fait partie du flux de travail d'une page du logiciel Litesizer™ 100/500 (voir Figure 4).

Figure 4 : Aperçu des résultats d'une mesure DLS Les résultats initiaux (diamètre hydrodynamique, indice de polydispersité) sont affichés ainsi que des informations sur la fonction de corrélation (ligne de base, intercept, etc.). Le graphique de distribution de la taille des particules donne des informations supplémentaires sur les différentes populations de taille au sein de l'échantillon mesuré.
Comme les résultats des mesures DLS sont basés sur l'intensité (les fluctuations d'intensité au fil du temps sont détectées), c'est le modèle de pondération principal affiché dans un logiciel DLS. La distribution basée sur l'intensité peut être recalculée en une distribution basée sur le volume et le nombre. Pour cela, l'indice de réfraction du matériau et l'absorbance de l'échantillon mesuré à la longueur d'onde du laser doivent être connus. Les techniques basées sur l'intensité mettent l'accent sur les particules plus grandes (elles diffusent plus de lumière que les particules plus petites). Les distributions basées sur le volume et le nombre montreront une tendance vers des fractions de particules plus petites. Il est important de noter que les trois distributions de taille ne sont que des représentations différentes de la même réalité physique d'une distribution de particules de tailles différentes. Les résultats initiaux d'une mesure DLS (diamètre hydrodynamique et indice de polydispersité) sont liés à la distribution de taille des particules pondérée par l'intensité définie par l'ISO 224121. Par conséquent, ces valeurs ne changeront pas, si différents modèles de pondération sont sélectionnés.
Vérification de la qualité des données des mesures DLS
Lors d'une mesure, le logiciel DLS affiche des signaux en direct de la trace d'intensité ainsi que de la fonction de corrélation générée. Ces signaux fournissent beaucoup d'informations sur la qualité des données. La trace d'intensité montrera des fluctuations régulières de la lumière diffusée, si des échantillons monodisperses sont mesurés. S'il y a des pics aigus, il est très probable que l'échantillon soit contaminé par des particules de poussière ou des agrégats. Un autre effet qui peut être observé est que la trace d'intensité augmente ou diminue. Une augmentation ou une diminution constante de la trace d'intensité pourrait montrer un gradient thermique pendant le temps de mesure. De plus, une augmentation constante peut indiquer une agrégation et une diminution constante peut être due à la sédimentation. La fonction de corrélation donne des informations sur le rapport signal-bruit ainsi que sur la présence de particules de poussière ou d'agrégats. Pour une dispersion monomodale, la fonction de corrélation doit être lisse et avec un seul déclin exponentiel. Une ligne de base non linéaire incluant plusieurs bosses indique la présence de particules de poussière ou d'agrégats. Le rapport signal-bruit peut être évalué à partir de la valeur de plateau de la fonction de corrélation à de petits temps de retard, le soi-disant intercept. S'il n'y a pas suffisamment de signal collecté, la différence sera faible et aucune fonction de corrélation significative ne pourra être générée. Cela pourrait être le cas, si des particules très petites sont mesurées ou si la concentration de particules est trop faible.
Choisir le bon angle de mesure
Les instruments DLS modernes fournissent différents angles de détection pour les mesures de taille des particules (typiquement à 15°, 90° et 175°). Litesizer™ 500 utilise la mesure de transmittance incluse pour la sélection automatique de l'angle. La diffusion latérale ou arrière est automatiquement sélectionnée par l'instrument en fonction de l'angle le plus approprié pour l'échantillon mesuré. Si la mesure est effectuée à 175°, il s'agit de diffusion arrière. À cet angle, le volume de diffusion (le volume où le faisceau laser incident et la lumière détectée se chevauchent) est proche du mur avant de la cuvette. Cela signifie que la longueur du chemin du laser à l'intérieur de l'échantillon est très courte. Ceci constitue une configuration idéale pour des échantillons hautement concentrés et troubles, car cela minimise l'effet de la diffusion multiple. La diffusion multiple signifie que la lumière est diffusée par plus d'une particule, ce qui peut interférer avec le signal de mesure. Afin de minimiser davantage la longueur du chemin du laser, la position de mise au point peut également être ajustée (Figure 5).

Figure 5 : Les instruments DLS peuvent ajuster la position de mise au point en déplaçant une lentille de mise au point. Si la position de mise au point est près du mur avant de la cuvette, les événements de diffusion multiples peuvent être minimisés. Le chevauchement du faisceau laser incident et de la lumière diffusée est appelé volume de diffusion.
La diffusion latérale à 90° est l'angle de choix pour les échantillons faiblement diffusants de petites particules, car l'éclat créé par le laser au niveau de la paroi de la cuvette est bloqué pour entrer dans l'optique de détection, ce qui conduit à un résultat plus propre. Par conséquent, les mesures effectuées en utilisant l'angle latéral sont moins sensibles à la saleté et aux rayures sur le mur de la cuvette. L'angle d'avance à 15° est utilisé pour surveiller l'agrégation ou si un échantillon de plus petites particules contient quelques grandes particules. Comme les particules plus grandes diffusent plus de lumière dans la direction avant que dans d'autres directions, ces particules sont mises en évidence à cet angle. En comparant les résultats avec d'autres angles de mesure, la présence d'agrégats peut être surveillée.
Résumé et conclusion
La diffusion dynamique de la lumière est une technique bien établie et standardisée pour l'analyse de la taille des particules dans la plage nanométrique et est utilisée depuis environ 40 ans. DLS fournit des informations sur la taille moyenne des particules ainsi que sur la distribution de la taille des particules. Il couvre une large gamme de tailles allant de la plage nanométrique inférieure jusqu'à plusieurs micromètres. Seules de faibles volumes d'échantillons sont nécessaires et l'échantillon peut être réutilisé après la mesure. Les instruments fournissent normalement également la diffusion de lumière électrophorétique (ELS) et la diffusion de lumière statique (SLS) pour l'analyse du potentiel zêta et la détermination de la masse moléculaire afin de servir d'outil idéal pour une analyse approfondie des particules.
En savoir plus sur les angles de détection utilisés par les instruments DLS ici.
Pour plus d'informations sur les instruments Litesizer™ 100/500, voir ici.
Références
1. ISO 22412:2017. Analyse de la taille des particules – Diffusion dynamique de la lumière (DLS). ISO est l'Organisation internationale de normalisation.